| Point detectors |
| Image Registration and Fusion Systems |
|
|
|
The accuracy of an image registration method heavily depends on the accuracy of the corresponding landmarks in the images
used to determine the transformation parameters. In a study to determine the sensitivity of various point detectors to
radiometric differences between images, landmarks were detected on the red and green bands of various color images. An
example color image is given in Fig. 1 and its red and green bands are shown in Figs. 2 and 3. Points were detected in the two
color bands by 11 different detectors. Points falling within distance sqrt(2) pixels of each other in the images were considered
corresponding points. The number of corresponding points found in Figs. 2 and 3 is denoted by n and average distance
between the n corresponding points is denoted by A, which characterizes the positional accuracy of detected points. The
smaller the value for A, the more accurate the correspondences is. Most landmarks are obtained by the Harris detector [4] while
highest positional accuracy is reached by the LoG detector in this experiment.
One-hundred widely dispersed points are detected by the 11 detectors in Figs. 2 and 3 and the results are overlaid in Figs. 4 –
14 for visual comparison. A point found in the red band is shown by a red `+’, while a point found in the green band is shown by
a green `+’. When detected points in the two bands coincide, the point is shown by a yellow `+’.
Results reported here show performances of the detectors under radiometric change. There are other factors to consider when
choosing a point detector. These include sensitivity to 1) noise, 2) change in image resolution, and 3) change in image
geometry. Point selection is the process of selecting a subset of detected points to meet a registration requirement.
used to determine the transformation parameters. In a study to determine the sensitivity of various point detectors to
radiometric differences between images, landmarks were detected on the red and green bands of various color images. An
example color image is given in Fig. 1 and its red and green bands are shown in Figs. 2 and 3. Points were detected in the two
color bands by 11 different detectors. Points falling within distance sqrt(2) pixels of each other in the images were considered
corresponding points. The number of corresponding points found in Figs. 2 and 3 is denoted by n and average distance
between the n corresponding points is denoted by A, which characterizes the positional accuracy of detected points. The
smaller the value for A, the more accurate the correspondences is. Most landmarks are obtained by the Harris detector [4] while
highest positional accuracy is reached by the LoG detector in this experiment.
One-hundred widely dispersed points are detected by the 11 detectors in Figs. 2 and 3 and the results are overlaid in Figs. 4 –
14 for visual comparison. A point found in the red band is shown by a red `+’, while a point found in the green band is shown by
a green `+’. When detected points in the two bands coincide, the point is shown by a yellow `+’.
Results reported here show performances of the detectors under radiometric change. There are other factors to consider when
choosing a point detector. These include sensitivity to 1) noise, 2) change in image resolution, and 3) change in image
geometry. Point selection is the process of selecting a subset of detected points to meet a registration requirement.

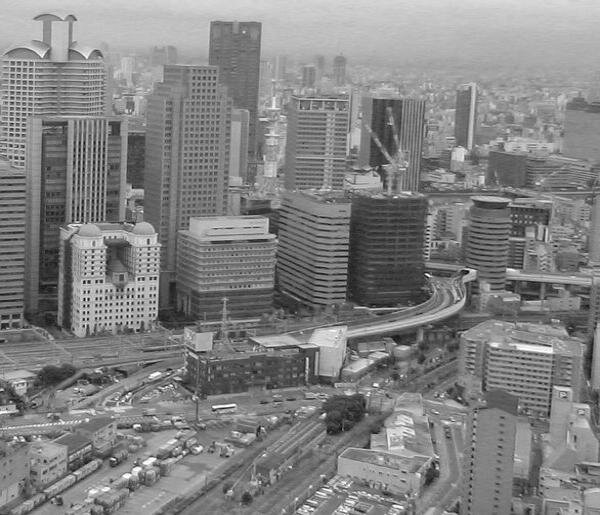












| Fig. 1. A color aerial image of the city of Osaka, Japan |
| Fig. 1. A color aerial image of the city of Osaka, Japan |
| Fig. 2. The red band in Fig. 1. |
| Fig. 3. The green band in Fig. 1. |
| Fig. 4. Winston and Lerman ’72 [1] (n=14, A=0.76) |
| Fig. 5. Kitchen and Rosenfeld ’82 [2] (n=41, A=0.44) |
| Fig. 6. The LoG detector (n=39, A=0.28) |
| Fig. 7. Fortsner and Gulch ’86 [3] (n=66, A=0.64) |
| Fig. 8. Harris [4] (n=75, A=0.66) |
| Fig. 9. Tomasi and Kanade ’91 [5] (n=61, A=0.72) |
| Fig. 10. Kohlmann ’96 [6] (n=55, A=0.81) |
| Fig. 11. Rohr ’99 [7] (n=73, A=0.50) |
| Fig. 12. Ando ’00 [8] (n=4, A=0.71) |
| Fig. 13. Loy and Zelinski ’02 [9] (n=19, A=0.83) |
| Fig. 14. Goshtasby ’05 [10] (n=19, A=0.61) |
References
- P. H. Winston and J. B. Lerman, Circular scan, Vision Flash 23, Artifcial IntelligenceLaboratory, Robotics Section,
Massachusetts Institute of Technology, March 1972. - L. Kitchen and A. Rosenfeld, Gray Level Corner Detection, Technical Report # 887, Computer Science Center,
University of Maryland, 1980. Also in Pattern Recognition Letters, vol. 1, Dec. 1982, 95-102. - W. Forstner and E. Gulch, A fast operator for detection and precise location of distinct points, corners and centers of
circular features, Intercommission Conf. Fast Processing of Photogrammetric Data, Interlaken Switzerland, 1987, 281-
305. - C. Harris and M. Stephens, A combined corner and edge detector, Proc. 4th Alvey Vision Conf. (AVC88), Univ.
Manchester, Aug. 31 - Sept. 2, 1988, 147-151. - C. Tomasi and T. Kanade, Shape and Motion from Image Streams: A Factorization Method{Part 3, Technical Report
CMU-CS-91-132, April 1991. - K. Kohlmann, Corner detection in natural images based on the 2-D Hilbert transform, Signal Processing, vol. 48,
1996, 225-234. - K. Rohr, Extraction of 3D anatomical point landmarks based on invariance principles, Pattern Recognition, vol. 32,
1999, 3-15. - S. Ando, Image field categorization and edge/corner detection from gradient covariance, IEEE Trans. Pattern Analysis
and Machine Intelligence, vol. 22, no. 2, 2000, 179-190. - G. Loy and A. Zelinsky, A fast radial symmetry transform for detecting points of interest, 7th Euproean Conf. Computer
Vision, 2002, 358-368. - A. Goshtasby, 2-D and 3-D Image Registration for Medical, Remote Sensing, and Industrial Applications, Wiley Press,
2005. - The LoG detector. See for example, Blostein, D. and Ahuja, N. A multiscale region detector. Computer Vision,
Graphics and Image Processing, vol. 45, pp. 22-41.
To obtain the software module implementing
any of the above detectors, follow this link =>
any of the above detectors, follow this link =>
